首先按极角排序,扫过去
对于当前扫到的点,连接它到原点的直线会把平面分割成两个半平面
对于直线左边的半平面(左边指的是给直线一个方向,比如是原点出发到当前点为正方向,左边半平面指的就是正半轴逆时针扫过的半平面)内的任意两个点与当前点构成的三角形都不覆盖原点
如图所示:
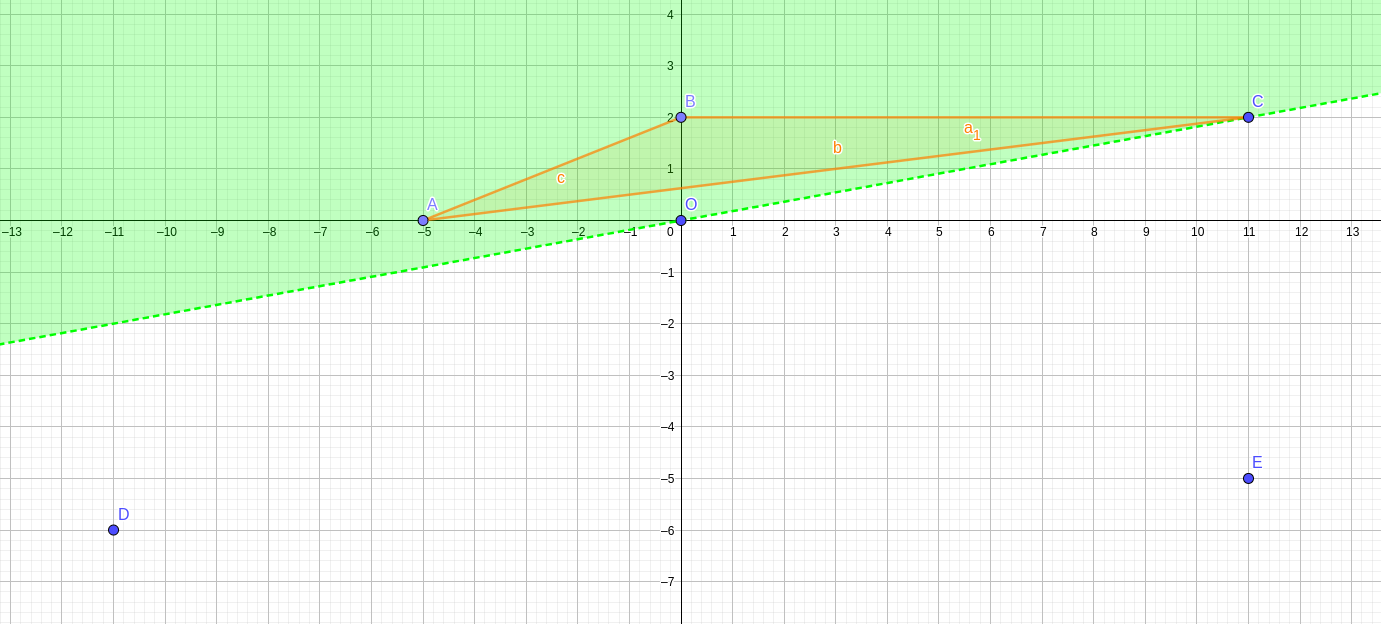
此图即为数据:
5
-5 0
0 2
11 2
-11 -6
11 -5
图中 $C$是极角最小的点 $(11, 2)$,绿色平面即为 $O->C$左边的半平面,该半平面覆盖了点 $A$和点 $B$,因此 $\triangle ABC$是一定不会过原点的
就这样扫过来,维护绿色半平面内包含的点数,设为 $cnt$,则每次答案就减去 $C _ {cnt} ^ 2$就行了
(初始时答案等于 $C _ n ^ 3$)
代码:
#include <bits/stdc++.h>
#define NS (100005)
typedef long long LL;
using namespace std;
const double PI = acos(-1);
template<typename _Tp> inline void IN(_Tp& dig)
{
char c; bool flag = 0; dig = 0;
while (c = getchar(), !isdigit(c)) if (c == '-') flag = 1;
while (isdigit(c)) dig = dig * 10 + c - '0', c = getchar();
if (flag) dig = -dig;
}
struct Point
{
double x, y, r;
Point() {x = y = r = 0;}
Point(double a, double b)
{
x = a, y = b, r = atan2(b, a);
if (r < 0) r += PI * 2;
}
bool operator < (const Point oth) const {return r < oth.r;}
} P[NS];
int n;
LL ans;
int main(int argc, char const* argv[])
{
IN(n);
for (int i = 1, a, b; i <= n; i += 1)
IN(a), IN(b), P[i] = Point(a, b);
if (n <= 2) puts("0"), exit(0);
ans = 1ll * n * (n - 1) * (n - 2) / 6, sort(P + 1, P + 1 + n);
double dr = PI;
for (int i = 1, j = 1, cnt = 0; i <= n; i += 1)
{
dr += P[i].r - P[i - 1].r;
while (j <= n && P[j].r < dr) cnt++, j++;
if (dr >= PI * 2)
{
dr -= PI * 2;
if (j > n) j = 1;
while (j <= n && P[j].r < dr) cnt++, j++;
}
if (cnt >= 2) ans -= ((1ll * (cnt - 1) * (cnt - 2)) >> 1);
cnt--;
}
printf("%lld\n", ans);
return 0;
}
0 条评论